Technology is here to create change
Author: Silvia Zuber
When it comes to Jamie Paik’s robots, size doesn’t matter. The miniature devices make the most of their abilities by working together. The researcher wants her work to inspire others, but she has also had to answer some critical questions.
Your research is focused on miniature robots. What initially led you to draw inspiration from ants in your work?
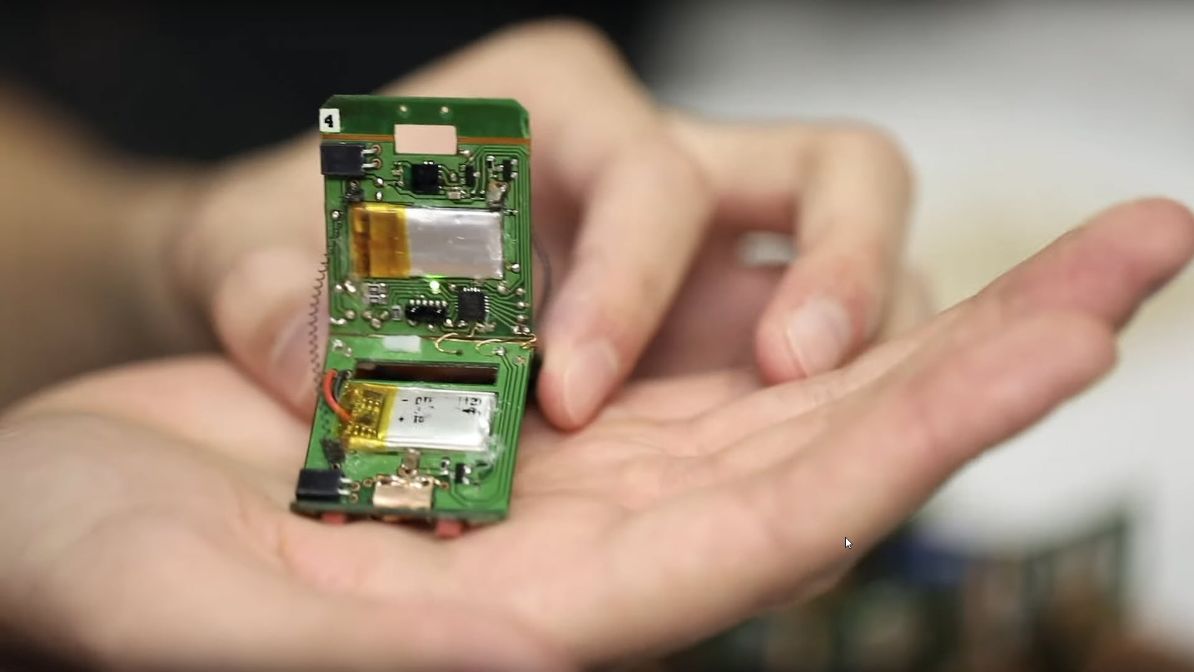
Many people, from artists to scientists, have used nature as their role model. Even the tiniest organism is perfectly optimized and programmed to survive in its environment. The same is true for ants, which have much more power and speed than a large animal. Together, they manage amazing feats, and are very adaptable and creative. This fits well with the goal of my research activities. My laboratory develops meso-scale (a couple of centimetres-sized) origami-robots. They can generally fit into the palm of your hand, but still have a very high level of functionality and processing power. They have a compact design for manufacturing and deployment which in turn provides highly cost-effective, unique solution for robots.
What role does your area of specialisation play in robotics?
Classically, machines and robots are optimized for their accuracy, strength and speed. I believe there is more to be considered and demanded in 2021 from robots. Beyond their mechanical performance, we want them to be safer, smarter and eventually seamlessly integrated into our daily lives. For that, they need them to be more interactive and adaptable. We want people to feel comfortable having our robots around them.
Part of your robots cooperate through swarm intelligence. How can we picture this?
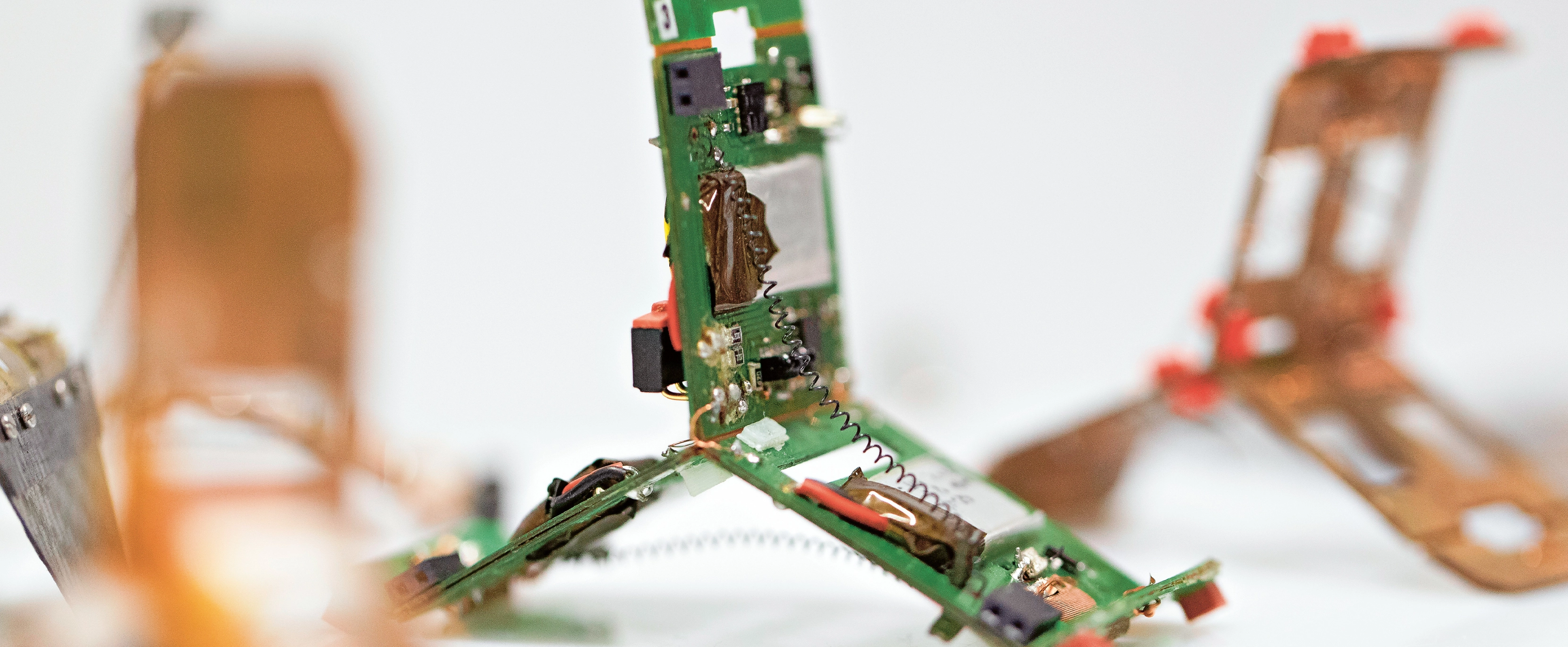
In Tribots, the key is in the distributed intelligence. The strength of robots like this is not in their individual strength but how they act collaboratively in large numbers. They can work collectively to expand their workspace for complex and sophisticated missions. Due to this extensive potential performance, there exists numerous research groups working on swarm intelligence of an exteremly simple robot. Our group focuses on designing and building swarm applicable robots that are able to complete complex tasks even as a single unit. We believe that such a robot platform can even expand further the understanding we already have of swarm robots. One of the first demonstrations is performed by Tribots.
Are your robots also used in the energy sector?
The progress in sustainable technology concerns not only the application and production of robots but also their functionality. Origami Robots can significantly reduce the production and delivery costs as they are foldable quasi-2D crease patterned machines that can reconstruct various 3D shapes. Equipped with the latest sensors and processors, they can be customized to be used in conjunction with various types of robots. For example, robogami drones could change the size of their body shape to squeeze through small openings or having deployable structures that are easy to store and transport.
Origami robots can be used as platforms for energy harvesting. In Chile, we used floating, self-assemblable origami robot modules on a water reservoir to conserve water. They swam on the water surface to block solar radiation, subsequently, water evaporation. Fitted with solar panels, they also harvested energy for a sustainable operation of the floating robot agents to align themselves towards the sun.
How could the robots assist Swissgrid?
Origami robots is a novel approach in designing and building robots that are customizable and adaptable. This new technology can add automation and technology in the areas that are often considered to be too small, too random, too sporadic (ie high cost per task), therefore, overlooked.
The wide range of my group's origami robots, as well as soft robots, have applications that are as varied as their design such as medical, space, emergency mitigation and entertainment. While their appearance may differ, what they share in common is the core technologies that aim at the human-robot interactions through the intuitive and agile robotic platform.
Although Tribots were never built to be an inspection robot, we can foresee modifying the current design (add additional sensors, transmitters, etc) to be conducive to be surveillance/ inspection robots for large, distributed, narrow, or unpredictable environments. For instance, wheels can be added to small robots for inspection activities in pipes, or become part of drone structures for work from the air. Best of it all, their light-weight and quasi 2D design mean that a couple of "casualties" or lost robots would not be detrimental to the mission nor to the budget.
The functionality of the grid requires constant optimisation. Will you ever reach the end of your development work?
A robot or system, by its very nature, is never perfect. Unfortunately, I can’t just tick off my wish-list and say that’s that, because some things are mutually exclusive. For example, we want a robot to be light so that it consumes as little energy as possible. But, at the same time, it needs to be as robust and adaptable as possible. This, in turn, makes the robot heavy. So, it’s impossible to have everything all at the same time. As a result, I’m forever looking for compromises and optimizing the latest design criteria.
A robot or system, by its very nature, is never perfect.
Infrastructure projects at Swissgrid are planned and realized on a long-term basis. How quickly do you bring your ideas to life?
In the nine years that I’ve been working at the EPFL, we have developed a whole range of robots that are being used in practice. But it’s difficult to define a specific development time for a robot, as it depends on various factors. For instance, am I building on existing technology or do I want to invent something entirely new? However, one of the most advantageous aspects of origami robot designs is its customizability and modularity. These are two factors that can drastically reduce the iteration and production lead time.
What are the challenges involved in long-term projects?
You need perseverance and an open eye for what’s going on around you. It would be a waste of time to reinvent the wheel if a researcher somewhere else in the world had already found a better solution. This doesn’t just apply to directly comparable projects. It’s possible, for example, that a material developed for new bottle tops might be ideal for use in one of our projects.
Do you come across resistance or criticism in your work?
When I tell people that I conduct research on robots, the reactions I get are very different. I believe that, as a researcher, I have a responsibility to explain exactly what I do and what my goals are. I want to inspire people with my work. This naturally also includes the questions of the final product but also the spin-off components.
Are measures needed to improve the acceptance of robots or even to regulate their development?
Yes and no. Technology is here to create change. You can’t just put some blanket hold on its development. Those who work on the latest technologies don’t have to take many guidelines into account. Guidelines only appear if something doesn’t work as it should. However, regulators are finding it difficult to keep pace with the speed of technological developments. So it’s the responsibility of developers and companies to develop technologies ethically and use them fairly in relation to consumers. If that happens, acceptance will follow. Unfortunately, consumers currently have few options.
When taken individually, the power and intelligence of ants are limited. But as a colony they can apply complex strategies to perform challenging tasks. The robotics researchers at the Reconfigurable Robotic Laboratory, EPFL, headed by Prof. Jamie Paik have reproduced this phenomenon and developed robots that weigh just 10 grams. They display minimal physical intelligence at an individual level, but are able to communicate and act collectively. Together, they are able to identify and overcome obstacles and move objects that are larger and heavier than they are themselves.